
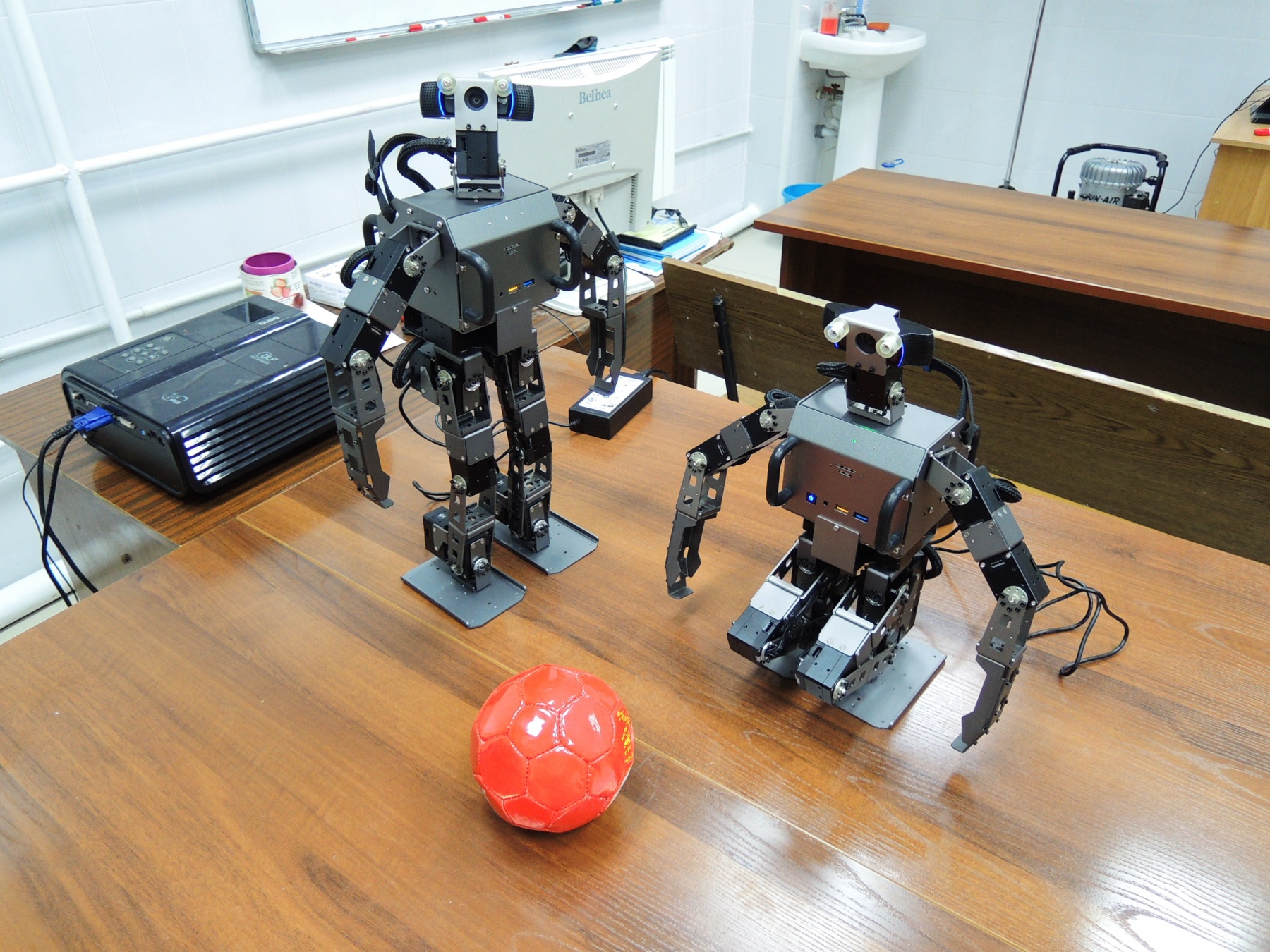
Студенты ФТФ Томского госуниверситета, обучающиеся по программе «Моделирование робототехнических систем», под руководством доцента кафедры прикладной газовой динамики и горения Фролова Олега Юрьевича во время учебной практики отрабатывают навыки «общения» с антропоморфными роботами.
Еще 10-15 лет назад большинство людей воспринимало роботов как плод фантазии писателей и кинематографистов либо в качестве каких-либо промышленных устройств, абсолютно непонятных простому обывателю. С течением времени ситуация изменилась, и сегодня различные робототехнические устройства можно встретить на каждом шагу: это роботы для уборки и охраны помещений, роботы для удаленного присутствия, сервисные роботы для выполнения рабочих операций в повседневной жизни человека и множество других.
Сегодня в сфере образования вхождение в робототехнику связано с появлением множества средств макетирования роботов, готовых к использованию программно-аппаратных комплексов с открытой документацией и свободно распространяемого алгоритмического программного обеспечения.
– Организация учебного процесса в вузе в большей степени носит исследовательский характер, поэтому задачи собственно макетирования и конструирования чего-либо отходят на второй план – на это нужно тратить слишком много времени. Поэтому в вузах чаще всего применяют готовые к эксплуатации модели роботов или лабораторные установки, – объясняет доцент кафедры прикладной газовой динамики и горения ФТФ ТГУ Олег Фролов.

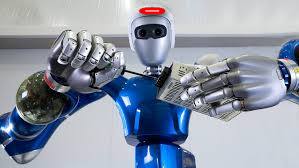
Антропоморфный робот, используемый на ФТФ, представляет собой человекоподобную модель высотой 51 см, включающую 20 степеней подвижности суставов на базе сервоприводов, систему технического зрения и встроенный ПК на базе процессора Intel. При этом функциональные возможности антропоморфных роботов в образовательном процессе очень обширны и позволяют на практике изучать элементы теории автоматического управления, программную архитектуру систем управления роботом, инерциальные навигационные системы, алгоритмы автономной навигации, техническое зрение, распознавание, селекцию объектов и многое другое.
– В новом учебном году мы планируем работать сразу над несколькими интересными проектами. Например, над разработкой алгоритмов управления антропоморфным роботом для преодоления препятствий в автономном и полуавтономном режимах (это когда переход между задачами осуществляется по команде оператора). Будем решать и другие задачи, где робот сможет ползком преодолевать преграды на пути, взбираться по лестнице, преодолевать плоскости с разным наклоном, двигаться на руках, – добавляет Олег Юрьевич.
Также в планах изучить принципы взаимодействия роботов между собой и с технологическими машинами, разработать алгоритмы автономной навигации, технического зрения, распознавания и выбора объектов при выполнении технологических операций антропоморфным роботом.
– В последние годы тематика разработок и соревнований в робототехнике стала ориентироваться на решение практических повседневных задач с помощью антропоморфных роботов. Например, это разработка алгоритмов управления движением автономных мобильных платформ и транспорта с рулевым управлением. Поэтому каждый из наших проектов можно будет воспринимать в качестве первых этапов становления профессиональных разработчиков в области робототехники, – подытожил Олег Фролов.
Контактные данные
Полезные ссылки






links
Томский государственный университет
Физико-технический факультет Томского государственного университета
Электронный университет - MOODLE
Научная библиотека Томского государственного университета
Сайт студентов ТГУ
Институт дистанционного образования Томского государственного университета
© 2013 - 2025 Кафедра автоматизации технологических процессов физико-технического факультета Томского государственного университета